
Page 91 - 1090325小論文
P. 91
3D 自動收納器
二、材料規格
討論及挑選材料規格在此實驗當中是相當重要的一個步驟,因為此實驗需要
一定的精確度,才能測出客觀的數據。以下為筆者選取的材料規格。
(一)、竹筷:長度約為 20cm
(二)、滑輪組:選用教學演示用滑輪組
(三)、微型馬達:選用 6V 直流微型馬達
(四)、橡膠皮帶:選用橡膠工業傳送同步帶
(五)、鐵鉤:選用 J 型螺絲金屬鉤
(六)、聯軸器:選用 3mm 轉 5mm 聯軸器
(七)、齒輪:內徑 3mm 平齒輪
(八)、Arduino 開發板:DFRobot 開發板及套件
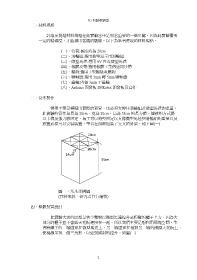
三、骨架製作
骨架主要是模擬出實際的背景,也必須支撐住滑輪組及微型馬達的重量。
此實驗的骨架為長為 20cm、寬為 20cm,高為 35cm 的長方體。連接的方式是
以卡榫及強力膠固定,為了可以夠堅固足以支撐微型馬達與滑輪組的重量以及
放置面積可以安裝裝置,筆者在頂部加裝了交叉的骨架。如下圖(一)
圖一:基本架構圖
(資料來源:研究者自行繪製)
四、整體裝置設計
此實驗大致的原型是會令載物以微型馬達拉升至模擬的櫃子上方,因為大
部分的櫃子並不會與天花板連接在一起,所以我們主要是想利用那塊空間。筆
者將繩子的一端固定在微型馬達上,另一端固定在相對另一端的模擬天花板上,
使棉線呈現一個三角形,以達到傾斜的拉升。如圖(二)
2